Inferring subjective preferences on robot trajectories using EEG signals
Iwane, F., Halvagal, M. S., Iturrate, I., Batzianoulis, I., Chavarriaga, R., Billard, A., & Millán, J. D. R.
2019 9th International IEEE/EMBS Conference on Neural Engineering (NER), 2019
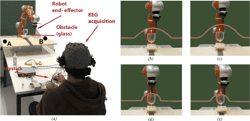
Cognitive information has been exploited in noninvasive Brain Computer Interface (BCI) scenarios to provide autonomous external agents with additional information. In this context, Error-related potentials (ErrPs), temporal deflections in electroencephalogram (EEG) signals when humans perceive erroneous actions, have been exploited to teach correct policies to agents. However, previous works have shared same objective criteria to evaluate actions of agents across humans. Therefore, it is yet an open question whether ErrPs are elicited when humans assess actions based on individual subjective criteria, and if such neuronal activities can be exploited in BCIs to enhance personalized human computer interactions. In this work, we evaluate whether ErrPs are elicited while humans assess actions based on individual subjective criteria. For this purpose, we analyze EEG signals while humans evaluate trajectories performed by the robot to avoid an obstacle. We show that the ErrP can be generated even while the human evaluates the action based on his/her subjective criteria, and that such neuronal activity reveals subjective aspects when assessing the appropriateness of the action. These findings open the door to the exploitation of neural correlates for the personalized human computer interactions, and thus to building adaptable, individualized neuroprosthetic devices.